XPENG IRON技术细节公布
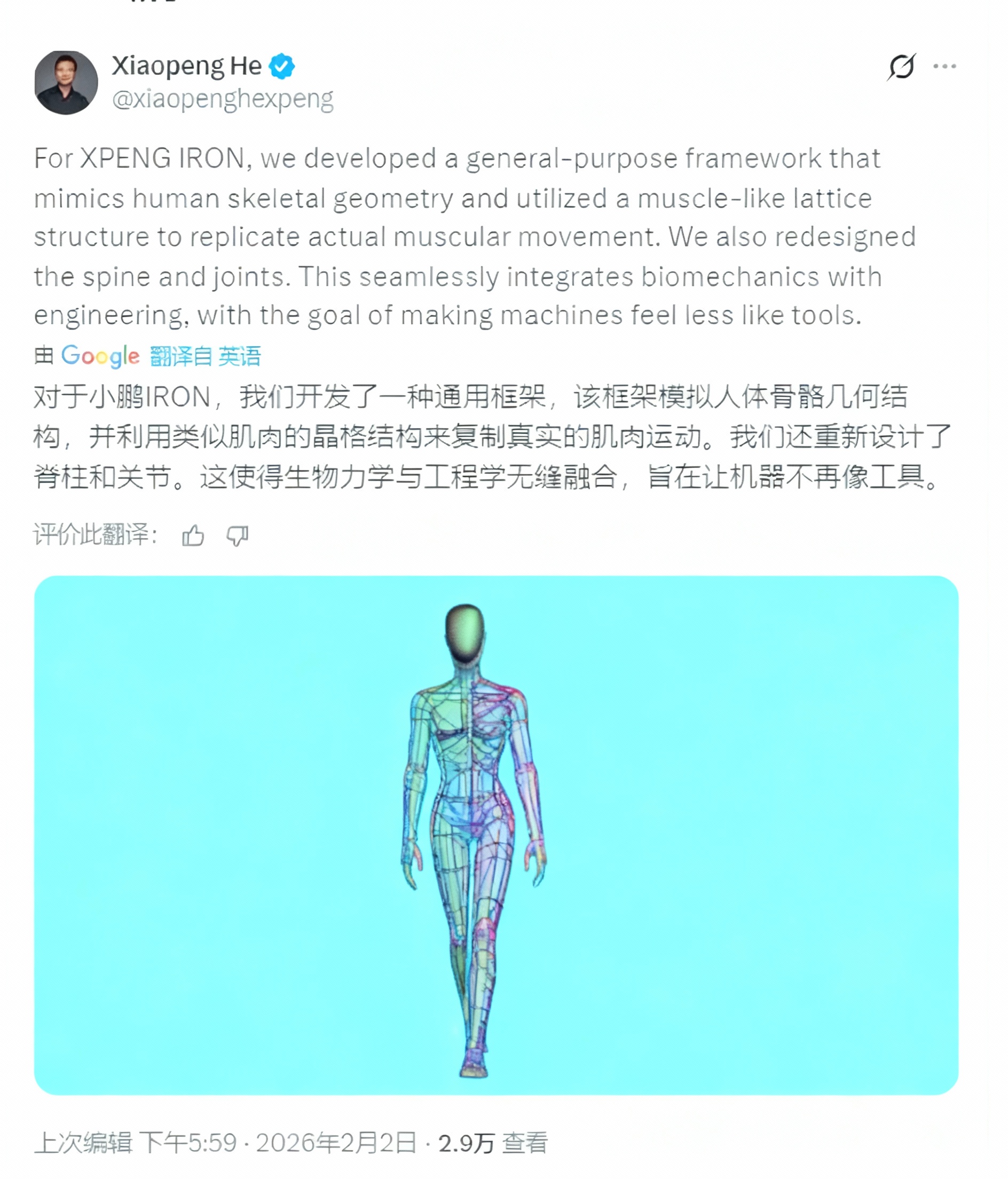
2026年2月2日,何小鹏在社交媒体正式公布了XPENG IRON的前沿技术细节。XPENG IRON采用模拟人体骨骼几何的通用仿生框架,引入“肌肉样格构”结构来复刻真实肌肉运动。同时,研发团队重新设计了机器人的脊柱与关节,深度融合生物力学与工程学,让机器人更具生命感,而非冰冷工具。
四个维度创新实现跨越
XPENG IRON的研发聚焦于打破传统机械结构的生硬感,通过四个维度的创新,实现从“机器形态”到“生物动态”的跨越:
- 骨骼仿生:抛弃传统工业连杆设计,通用框架直接模仿人体骨骼几何形态与运动链,极大提升了机器人形体与运动的自然度。
- 肌肉样格构:采用可拉伸、网格化的创新材料结构,模拟生物肌肉发力时的收缩与伸展特性,为肢体提供更柔和的动力传输。
- 脊柱与关节重构:重新设计的脊柱兼顾柔性与稳定性,关键关节的优化增强了步态与上肢动作的连贯性。
- 人机亲和目标:技术发展的最终目标是让机器不再仅仅是工具,通过更自然的交互形式建立人机信任。
材料科学与运动学结构突破
在材料科学与运动学结构上,XPENG IRON也有重大突破。“肌肉样格构”是一种具有拉胀特性的超材料结构,在拉伸或压缩时能产生非线性体积变化,实现类似生物肌肉的储能与缓冲效果,使机器人动作更柔和,物理接触更安全。运动学层面,遵循生物力学“动力链”原则,针对性开发的脊柱既能为躯干提供支撑,又能在行走和转向时提供扭转自由度,配合仿生关节模组,让机器人在复杂地形下步态更稳健,上肢操作更细腻。
仿生技术提升实际表现与安全性
仿生技术的深度应用提升了XPENG IRON在实际场景中的表现与安全性。其在家庭服务或公共场所与人接触时更安全,应对复杂环境的能力远超传统刚性机器人,还通过自然肢体语言消除人机隔阂,成为人类的“合作者”。
通用仿生框架开启新阶段
XPENG IRON的通用仿生框架标志着人形机器人研发进入生物力学与工程学深度融合的新阶段,实现了从“能走能动”到“动得自然、触得安全”的提升。
